空天智能无人系统团队在航空航天领域国际顶刊发文
相关成果发表于全球航天制导控制领域No.1的旗舰期刊JGCD,标志该算法在理论创新性和工程实用性两方面均达到了国际顶尖水平,推动我国可重复使用火箭制导技术跻身世界前列,形成原创技术优势。近日,CQ9电子 空天智能无人系统团队在《Journal of Guidance, Control and Dynamics》(JGCD)上发表题为“Embedded Online Trajectory Optimization Method for Hypersonic Entry”的研究成果,CQ9电子 王劲博副教授为第一作者,陈洪波教授为通信作者,硕士研究生张磊和博士研究生马家睿共同参与该研究。
高超声速飞行器在进入大气层过程中面临极大的挑战,其优化问题具有高度非线性的动力学和非凸约束,该研究提出了一种新型嵌入式在线轨迹优化算法,用于解决先进制导应用中的挑战。文章利用了多核处理器日益成熟的特点,在算法的各个层面采用了并行加速策略,从而实现了显著的计算加速,提高了解决方案的准确性以及在弹/箭/机载应用中的适用性。该研究中的定制化并行内点法成功应用于2026年1月12日的火箭子级百公里大气再入闭环制导飞行试验,实现“顶刊+闭环制导飞行试验”的双重里程碑。
论文页面部分截图
1
研究创新
1.本研究所提出的算法的一个关键特点是利用了序列凸优化(SCP)以及内点法(IPM)的可并行性,极大地提高了算法内外循环的计算效率。针对外循环,算法基于一阶保持离散化方法提出了并行参数计算策略以及自适应网格更新策略,确保了解决方案的动态可行性,有效提高了外循环迭代的效率。
2.针对内循环中占比最大的计算负荷,提出了一种求解KKT系统的新型并行计算方法以及利用迭代解的热启动策略,实现了计算性能的深度优化,该方法为航空航天领域问题的首个并行内点法应用。
3.在代理机载计算机上面进行了数值实验,所提出的算法在保证求解方案精度的前提下具有较高的计算效率。
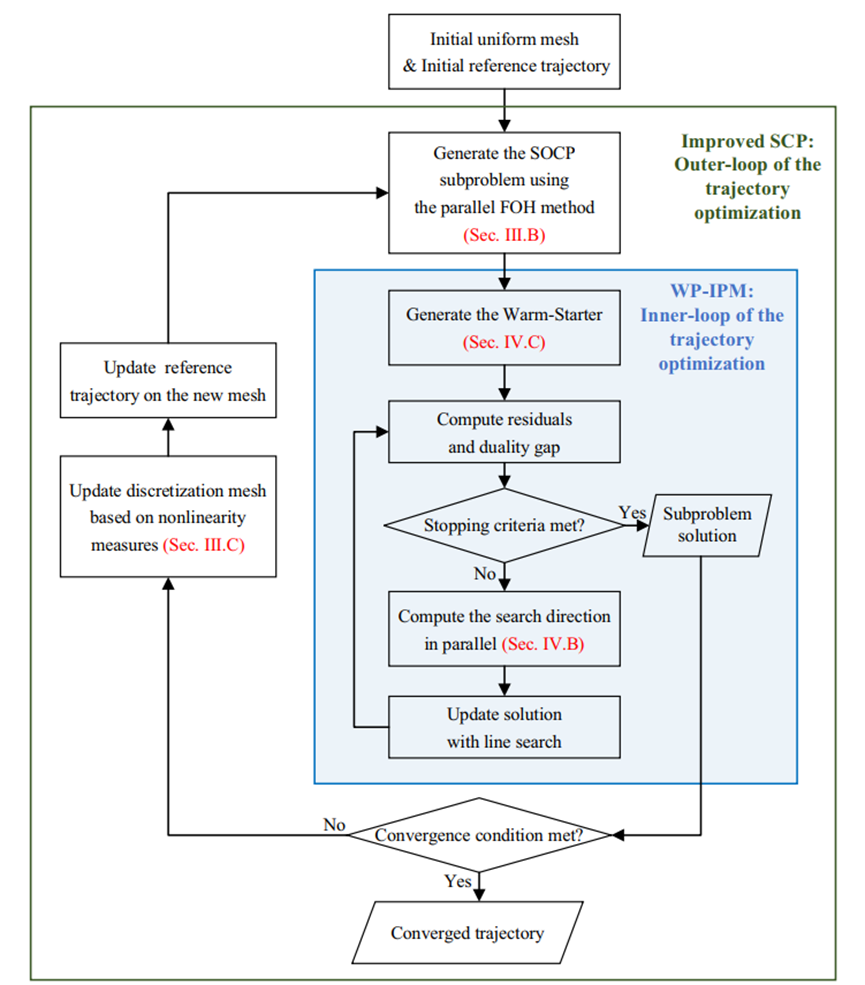
整体算法流程
2
应用价值
研究团队在搭载了TIC6678(8核DSP)的代理机载计算机进行了算法验证。在典型的多约束高超飞行器再入场景下,计算耗时不超过950毫秒(CAV-H模型)以及500毫秒(RLV模型),同时算法的解决方案具有较高的求解精度,完全满足自主制导的要求。其中,基于团队自研的箭载计算平台,热启动并行内点法应用于力鸿一号飞行器的大气再入闭环制导飞行试验,任务取得圆满成功。本研究所做的工作代表了高性能、嵌入式轨迹优化算法在自主航天制导任务中的发展方面的一项重大进步。
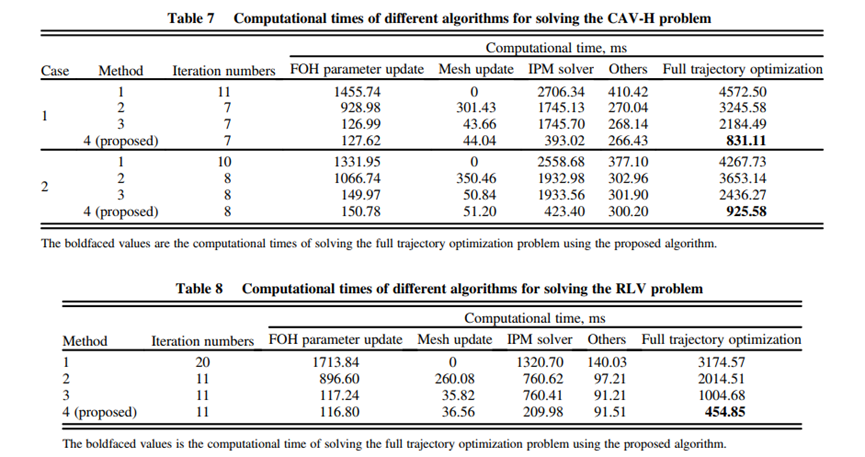
不同方法的计算效率对比
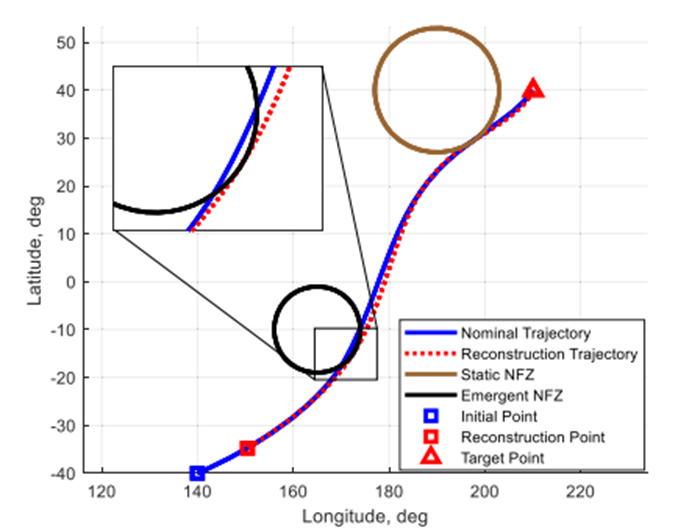
CAV-H场景下的优化结果

团队自研的慎思2D箭载计算平台
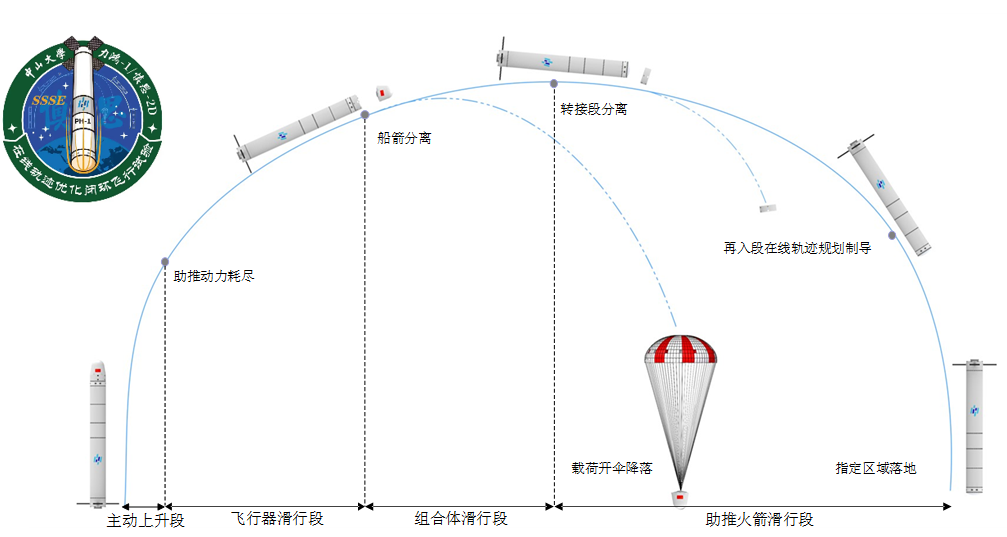
力鸿一号飞行试验任务剖面
论文链接:
//arc.aiaa.org/doi/10.2514/1.G009011
飞行试验链接:
//mp.weixin.qq.com/s/MzOWnC4e1aATci_7lBODfg
——宣传媒体中心——
编辑:马家睿 曾浩轩
责任编辑:许婕
初审:王劲博 杨波 陈平
复审:庄学彬 袁婷
终审:陈洪波 黄勇平